Digital Out
Hardware
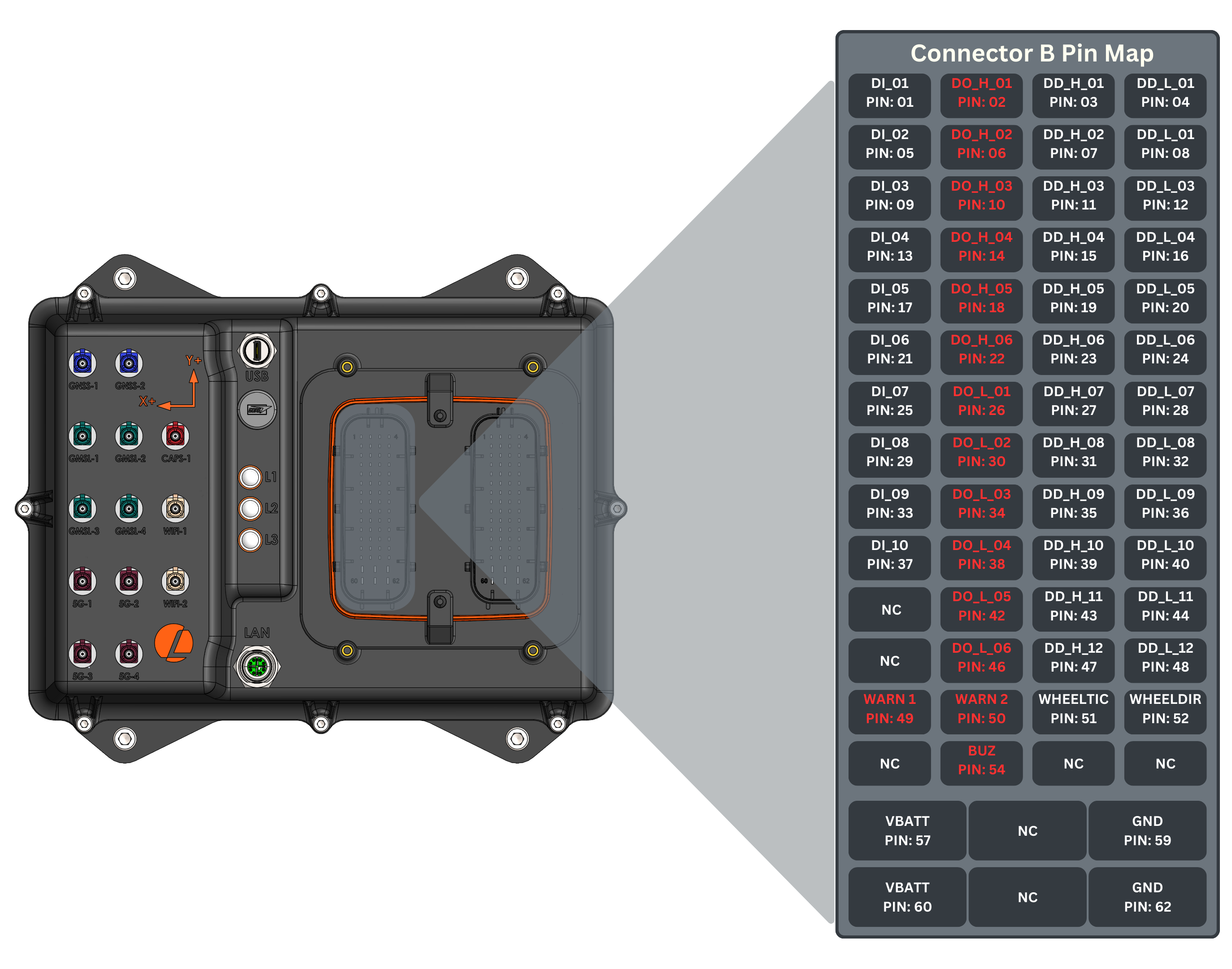
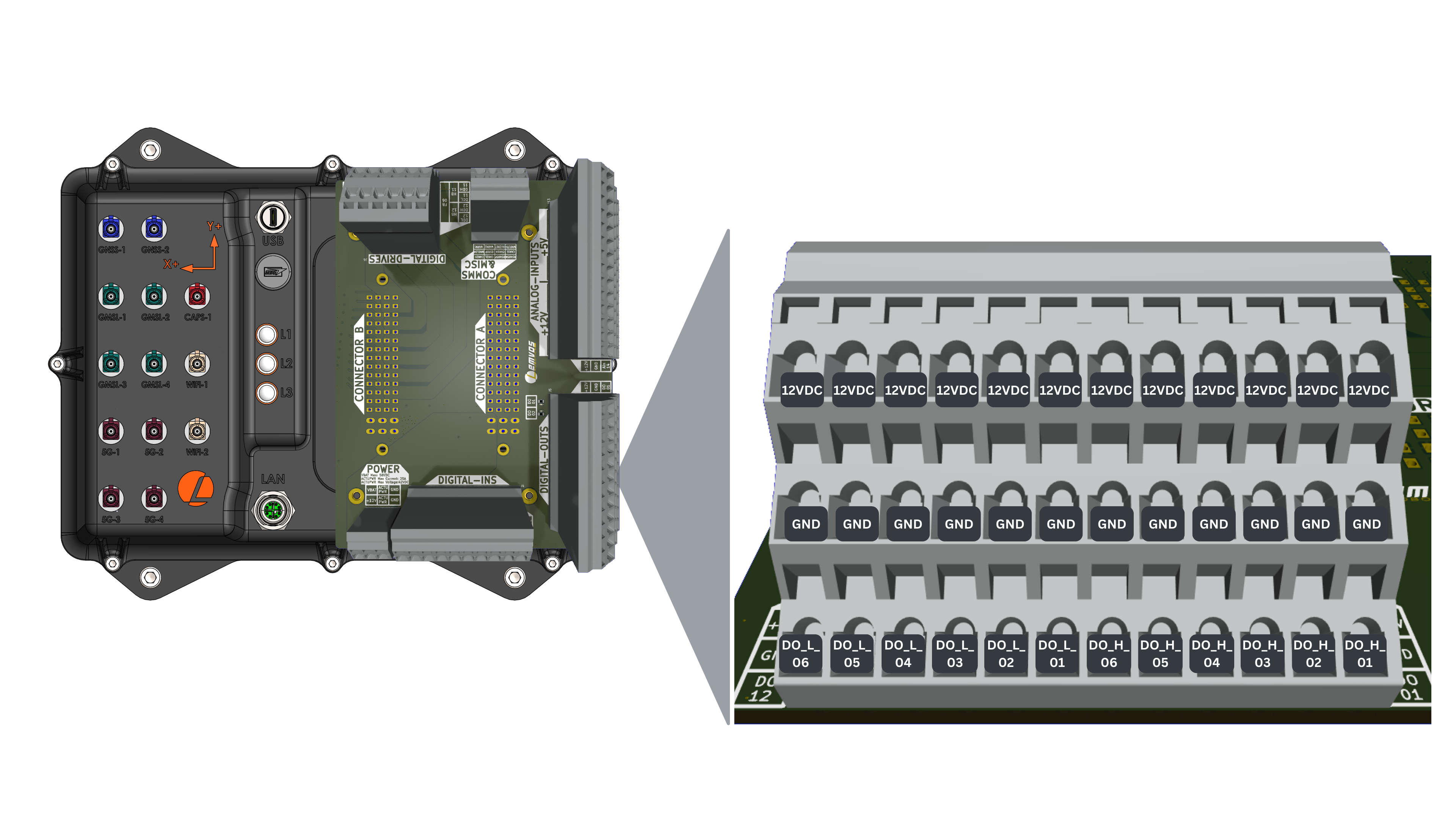
AutomatePro comes with 12x digital outputs for controlling external systems, from small solenoids to LEDs or small DC motors. Two different digital outputs are available. One is set up as a high-side output (DO_H_0x), which PWMs the onboard 12V as an output. The second is a low-side sink (DO_L_0x), which sinks up to 36V. The first four low-side channels are PWM controllable, and the final two are binary on/off switches.
Connector Pinout
- Connector
- Development Breakout Board
Digital Output High-Side (DO_H_x) Specifications
There are 6x high-side digital outputs, all of which are PWM-controllable switches.
| Parameter | Value |
|---|---|
| Output Voltage (On-state) | +12V (from on-board 12V) |
| Drive Current | 500mA |
| PWM Controllable | All (DO_H_01 - DO_H_06) |
| PWM Switching Frequency | 500Hz |
| Number of Outputs | 6 |
Digital Output Low-Side (DO_L_x) Specifications
There are 6x low-side digital outputs. The first four are PWM-controllable, while the final two are binary on/off switches.
| Parameter | Value |
|---|---|
| On-state | Sinks up to 36V |
| Drive Current | 500mA |
| PWM Controllable | DO_L_01 DO_L_02 DO_L_03 DO_L_04 DO_L_05 & DO_L_06 are On/Off switches |
| PWM Switching Frequency | 10Hz |
| Number of Outputs | 6 |
ROS API
Subscribers
| Topic | Type | Description |
|---|---|---|
/io/digital_out | automatepro_interfaces/msg/DigitalOut | Publish the desired digital output states to this topic. AutomatePro supports 12 digital output pins (6 high-side and 6 low-side). Each output pin is referred to as DIGITAL_OUT_H_XX or DIGITAL_OUT_L_XX, where H/L refers to High Side/Low Side and XX is the pin number, ranging from 01 to 06. d_out_pin_id: Data type: uint8 (Use ENUM constants defined in the message definition. DigitalOut.DIGITAL_OUT_H_XX: 01-06 DigitalOut.DIGITAL_OUT_L_XX: 01-06) duty_cycle_percent: Data type: uint8 Min: 0 in percentage % Max: 100 in percentage %Response rate: 200 ms |
Example
This example toggles the duty cycle of Digital Out 01 by publishing to the /io/digital_out topic.
The ROS package is available here.
- Python
- C++
import rclpy
from rclpy.node import Node
from automatepro_interfaces.msg import DigitalOut
class DigitalOutPublisher(Node):
def __init__(self):
super().__init__('digital_out_publisher')
self.publisher_ = self.create_publisher(DigitalOut, '/io/digital_out', 10)
self.timer = self.create_timer(1.0, self.timer_callback) # 1s
self.duty_cycle_sequence = [0, 50, 100, 50]
self.sequence_index = 0
def timer_callback(self):
msg = DigitalOut()
msg.d_out_pin_id = DigitalOut.DIGITAL_OUT_H_01 # Digital Out High Side Pin 01
msg.duty_cycle_percent = self.duty_cycle_sequence[self.sequence_index] # Duty Cycle: 0%, 50%, 100%, 50%
# 0% - OFF, 100% - ON
self.publisher_.publish(msg)
self.get_logger().info('Publishing: "%s"' % msg)
self.sequence_index = (self.sequence_index + 1) % len(self.duty_cycle_sequence)
def main(args=None):
rclpy.init(args=args)
node = DigitalOutPublisher()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
Run the node using the following command:
ros2 run automatepro_python_tutorials digital_out_node
#include <vector>
#include <rclcpp/rclcpp.hpp>
#include <automatepro_interfaces/msg/digital_out.hpp>
class DigitalOutPublisher : public rclcpp::Node
{
public:
DigitalOutPublisher()
: Node("digital_out_publisher"),
duty_cycle_sequence_{0, 50, 100, 50},
sequence_index_(0)
{
publisher_ = this->create_publisher<automatepro_interfaces::msg::DigitalOut>("/io/digital_out", 10);
timer_ = this->create_wall_timer(
std::chrono::seconds(1),
std::bind(&DigitalOutPublisher::timer_callback, this));
}
private:
void timer_callback()
{
auto msg = automatepro_interfaces::msg::DigitalOut();
msg.d_out_pin_id = automatepro_interfaces::msg::DigitalOut::DIGITAL_OUT_H_01; // Digital Out High Side Pin 01
msg.duty_cycle_percent = duty_cycle_sequence_[sequence_index_]; // Duty Cycle: 0%, 50%, 100%, 50%
// 0% - OFF, 100% - ON
publisher_->publish(msg);
RCLCPP_INFO(this->get_logger(), "Publishing: d_out_pin_id=%d, duty_cycle_percent=%d", msg.d_out_pin_id, msg.duty_cycle_percent);
// Update the sequence index
sequence_index_ = (sequence_index_ + 1) % duty_cycle_sequence_.size();
}
rclcpp::Publisher<automatepro_interfaces::msg::DigitalOut>::SharedPtr publisher_;
rclcpp::TimerBase::SharedPtr timer_;
std::vector<int> duty_cycle_sequence_;
size_t sequence_index_;
};
int main(int argc, char *argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<DigitalOutPublisher>());
rclcpp::shutdown();
return 0;
}
Run the node using the following command:
ros2 run automatepro_cpp_tutorials digital_out_node
It would be good to have a service that can change pin number and duty cycle instead of changing it from the code.